マイクロロボットを“流れ”作業で迅速に作製
生体分子モーターによる人工筋肉で自在にプリント・動的再構成可能に
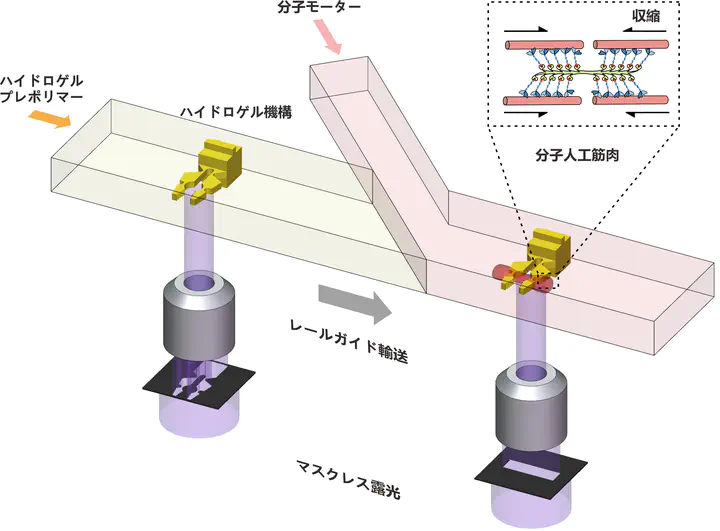 図1 マイクロロボットその場組み立て法
図1 マイクロロボットその場組み立て法大阪大学大学院工学研究科の森島圭祐教授、王穎哲特任研究員(常勤)は、 北陸先端科学技術大学院大学・先端科学技術研究科の平塚祐一准教授、岐阜大学・工学部の新田高洋教授との共同研究で、マイクロ流路内で、マイクロロボットの部品をプリント成形し、その場で組み立てることに成功しました。マイクロロボットの機械構造は光応答性ハイドロゲルでつくられ、アクチュエータは同じチームが開発した生体分子モーターからなる人工筋肉を利用しました。このアクチュエータと機械部品をマイクロ流路内で組み立てることにより、マイクロロボット製造の柔軟性と効率が向上しました。この方法で、様々な機能のマイクロロボットが実現されました。また、この成果により、これまで困難であった、特に柔軟な構造を持つマイクロソフトロボットの実現や、マイクロロボットの量産化が期待されます。
本研究成果は、2022年8月24日午後2時(米国時間)に発行される科学雑誌「Science Robotics」の表紙を飾りました。